Google научил собаку-робота новым трюкам
Любой, кто когда-либо наблюдал за движением собаки, будь это ходьба, прыжки или ловля летающей тарелки, вероятно, замечал, насколько динамичными, сложными и естественными они могут быть.
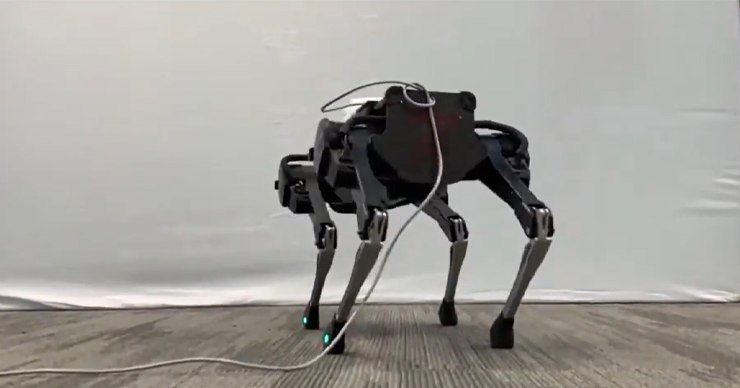
Исследователи из Google и Калифорнийского университета в Беркли обратились к данным о реальных движениях собак, чтобы обучить их роботизированного пса выполнять такие задачи, как ходьба с разной скоростью или вращение», передает mir24.tv
«Наша идея заключается в том, чтобы помочь роботам легче усваивать навыки, показывая им примеры животных, движущихся в естественной среде», – цитирует Popular Science Джейсона Пэна, студента-исследователя Google, докторанта в Беркли и автора статьи, описывающего этот проект.
Вместо того чтобы собирать новую информацию о собачьих движениях для этого проекта, команда использовала уже существующие данные, полученные от одного пса.
Но было не так просто загрузить эту информацию в мозг робота. Во-первых, тело робота менее гибко: у него нет позвоночника, его тело похоже на кирпич, а ИИ должен был заставить робота как можно лучше соответствовать реальным движениям пса. Следующие шаги включали использование компьютерного моделирования, чтобы виртуальная версия робота могла научиться имитировать действия реальной собаки.
Эта часть проекта предполагала использование машинного обучения – одной из форм искусственного интеллекта – для получения виртуальным роботом новых навыков.
«Алгоритм обучения пытался найти способ, который позволит роботу максимально точно воспроизвести движение», – говорит Пэн.
Конечным результатом было то, что робот смог выполнять действия, которые он узнал из реального поведения собаки, с имитацией, искусственным интеллектом и другими адаптивными мерами в качестве важнейших промежуточных шагов.
«Робот может воспроизвести массу двигательных навыков, разные виды походки, а также некоторые вращательные движения. Он даже шел задом наперед», – поделился Пэн.
Труднее всего роботу было выполнять быстрые, динамичные действия, такие как быстрый бег или прыжок. Это до сих пор не получилось воспроизвести. Пэн говорит, что использование этого метода для обучения робота выполнять задачи, гораздо быстрее кодирования навыков шаг за шагом.
«Даже для чего-то простого вроде ходьбы, это было то, что десятилетиями изучалось в сообществе робототехников», – резюмировал ученый, подчеркивая прорывной статус их опыта для кибернетики.


